| dc.contributor.author | Lee, Peter Q. | |
| dc.contributor.author | Zelek, John | |
| dc.contributor.author | Mombaur, Katja | |
| dc.date.accessioned | 2023-05-01 17:26:00 (GMT) | |
| dc.date.available | 2023-05-01 17:26:00 (GMT) | |
| dc.date.issued | 2022-11-03 | |
| dc.identifier.uri | https://doi.org/10.1109/BioRob52689.2022.9925302 | |
| dc.identifier.uri | http://hdl.handle.net/10012/19368 | |
| dc.description | © 2022 IEEE. Personal use of this material is permitted. Permission from IEEE must be obtained for all other uses, in any current or future media, including reprinting/republishing this material for advertising or promotional purposes, creating new collective works, for resale or redistribution to servers or lists, or reuse of any copyrighted component of this work in other works. | en |
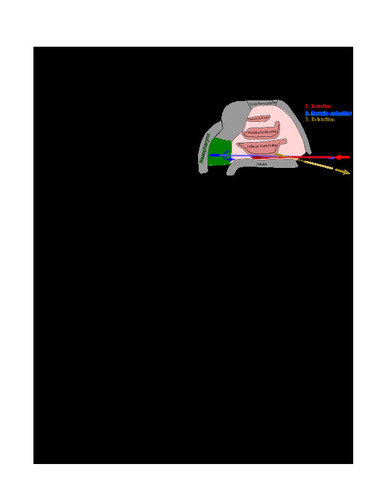
| dc.description.abstract | The nasopharyngeal swab is the standardized method of collecting specimens for diagnosing COVID-19, among numerous other respiratory illnesses. While there has been interest from the robotics community in the design of robots and manipulators for performing swab collections, detailed simulation and planning for swab insertion trajectories through the nasal cavity is less studied. In this work, we propose a simulation environment with the swab modelled as an Euler-Bernoulli beam, subject to linear elastic collisions coming from the nasal cavity. We evaluate the impact of inserting the swab with different amounts of force. We also leverage the simulation environment to pose an optimization problem that finds trajectories that minimize strain on the swab during the insertion. We find that the optimized trajectories adhere to qualitative clinical advice. | en |
| dc.description.sponsorship | Natural Sciences and Engineering Research Council of Canada, Canada Graduate Scholarship-Doctoral || Tri-Agency Canada Excellence Research Chair Program || University of Waterloo, Engineering Excellence Fellowship | en |
| dc.language.iso | en | en |
| dc.publisher | IEEE | en |
| dc.subject | robot | en |
| dc.subject | nasopharyngeal swab | en |
| dc.subject | finite element model | en |
| dc.subject | COVID-19 | en |
| dc.subject | optimization | en |
| dc.subject | simulation | en |
| dc.subject | beam | en |
| dc.title | Simulating and Optimizing Nasopharyngeal Swab Insertion Paths for use in Robotics | en |
| dc.type | Conference Paper | en |
| dcterms.bibliographicCitation | P. Q. Lee, J. S. Zelek and K. Mombaur, "Simulating and Optimizing Nasopharyngeal Swab Insertion Paths for use in Robotics," 2022 9th IEEE RAS/EMBS International Conference for Biomedical Robotics and Biomechatronics (BioRob), Seoul, Korea, Republic of, 2022, pp. 1-7, doi: 10.1109/BioRob52689.2022.9925302. | en |
| uws.contributor.affiliation1 | Faculty of Engineering | en |
| uws.contributor.affiliation2 | Systems Design Engineering | en |
| uws.typeOfResource | Text | en |
| uws.peerReviewStatus | Reviewed | en |
| uws.scholarLevel | Graduate | en |